
{kind=link}
In this guide, we will demonstrate how to replicate a physical device in Unreal® Engine and train it using reinforcement learning with the new v1.3 version of AMD Schola.
What is sim-to-real?
Sim-to-real is the process of developing and training agents in a simulated (virtual) environment and then transferring them to operate on physical hardware in the real world. This approach is widely used in robotics and reinforcement learning because it enables rapid prototyping and testing without incurring the risks and costs associated with using physical hardware during early development stages.
Agent car
The physical device we use is the SunFounder PiCar-X. Please see the device specification directly to get familiar with it. In particular, the PiCar-X has a max speed of 50 cm/s (1.8 km/h) and turning radius of 29 cm. We will replicate PiCar-X using the Chaos Vehicles module in Unreal Engine, and use the color sensor to collect observation as explained later.
Training task: line following
The goal is to use reinforcement learning to train the agent to follow a line on the floor. The agent will receive observations from a simulated color sensor that detects the line on the floor and will learn to steer left or right to stay on the line.
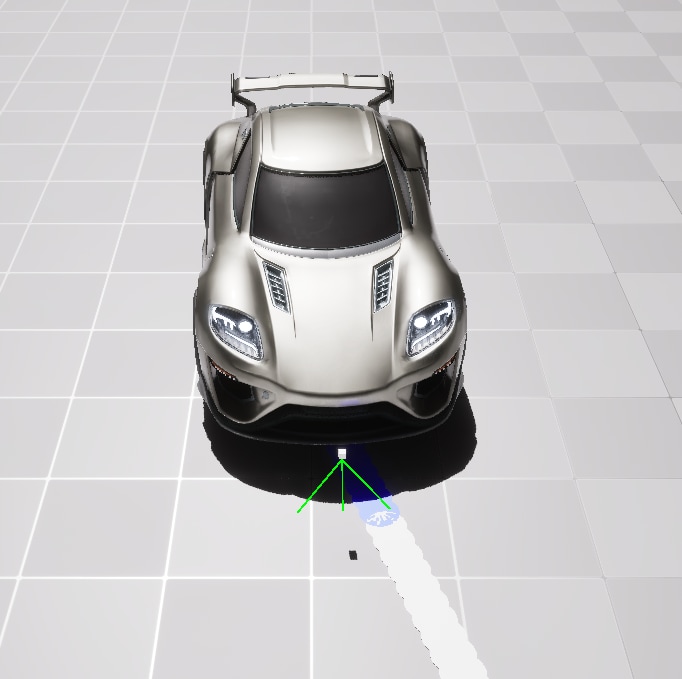
Environment design
The simulated environment consists of a simple track with a black line on a white floor, and the agent is set to always move forward at a constant speed. The agent is trained with the following:
- Observation (Simulating Color Sensors): Three binary values (0/1)
indicating whether the three color sensors detect the floor or the line. - Actuator: Left and right steering with a float range from -1.0 to
+1.0. - Reward Function: +1 reward for every unit moved forward along the
line. - Status Function: The episode ends when the agent deviates more
than 10 cm from the line.

Training
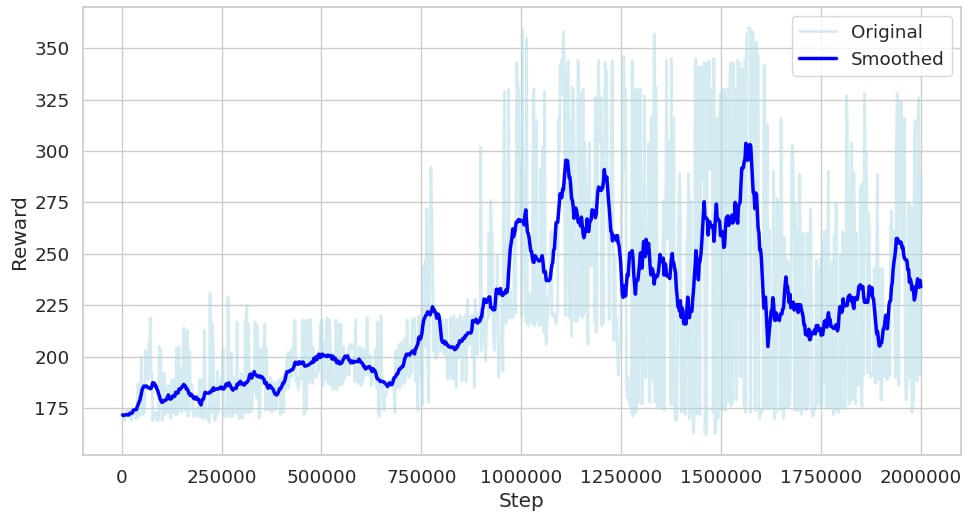
Training is conducted with AMD Schola in Unreal Engine using the Stable Baselines3 (SB3) library with the Proximal Policy Optimization (PPO) algorithm. In our experiment, the agent achieved good performance after 2 million steps of training.
NOTE: Use the --save-final-policy and --export-onnx flags during training to save the final policy and export it to ONNX format.
Using the ONNX model
Copy the .onnx file to the PiCar-X and use the ONNX Runtime for Raspberry Pi to run the model. The PiCar-X will use the trained model to make decisions based on the observations from the color sensor. The output of the model will be the steering actions, which will be sent to the PiCar-X’s steering motor. Below is an example of using the ONNX model with the PiCar-X.
from picarx import Picarx
def generate_input_from_sensors(sensor_values):
Convert grayscale sensor values to ONNX model input format.
Sensor values less than 700 are converted to 0, and values greater than or equal to 700 are converted to 1.
A = 0 if sensor_values[0] > 700 else 1
B = 0 if sensor_values[1] > 700 else 1
C = 0 if sensor_values[2] > 700 else 1
return np.array([[A, A, A, B, B, B, C, C, C]], dtype=np.float32)
def run_inference(session, input_data):
Run inference on the ONNX model using the provided input data.
for input_tensor, data in zip(session.get_inputs(), input_data):
input_feed[input_tensor.name] = data
output_name = session.get_outputs()[0].name
output = session.run([output_name], input_feed)[0]
def map_output_to_steering(output):
Map the ONNX model output to steering angle.
Output range is assumed to be [-1, 1], where -1 is full left and 1 is full right.
print(f"Output: {output}")
return output[0][0] * 90 # Scale to servo angle range (-90 to 90)
if __name__ == "__main__":
# Initialize Picarx and ONNX model
model_path = "ppo_final.onnx"
session = onnxruntime.InferenceSession(model_path)
# Get grayscale sensor values
sensor_values = px.get_grayscale_data()
# Generate ONNX model input
input_data = [generate_input_from_sensors(sensor_values), np.array([[[0]]], dtype=np.float32)] # State-in is unused
output = run_inference(session, input_data)
# Map output to steering angle
steering_angle = map_output_to_steering(output)
px.set_dir_servo_angle(steering_angle)
Acknowledgements
We gratefully acknowledge the contributions from Abhi Sachdeva, Josue Solano, Peter Quawas, Pramesh Singhavi, and Ryan Luo of UC San Diego’s ECE 191 course, taught by Professor Xinyu Zhang; the proof-of-concept resulting from their Senior Design Project catalyzed this demo.
View endnotes
Unreal® is a trademark or registered trademark of Epic Games, Inc. in the United States of America and elsewhere.